JUN '25
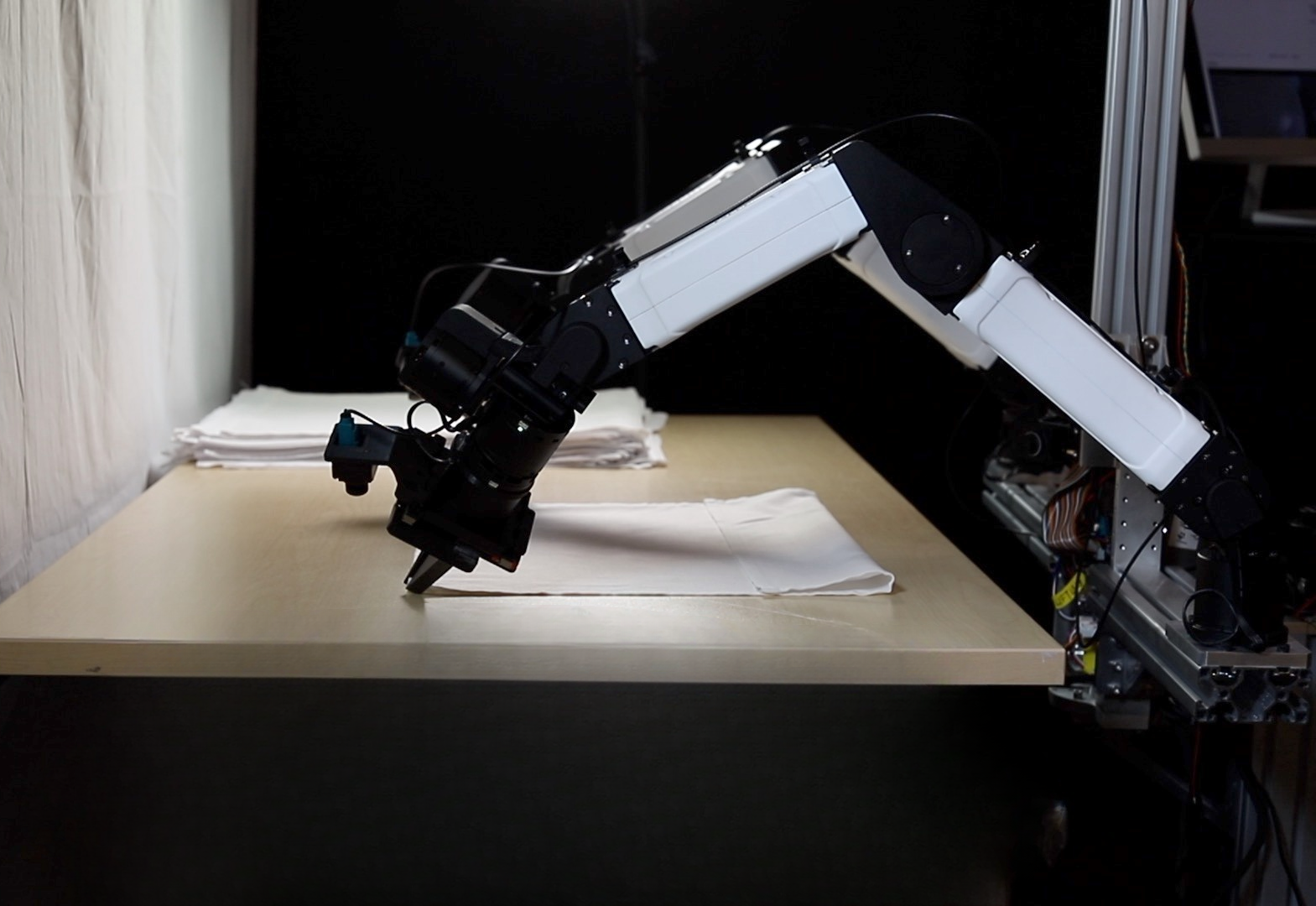
DYNA-1 Model
DYNA-1: The first VLA with 99%+ Success Rate
OCT '25
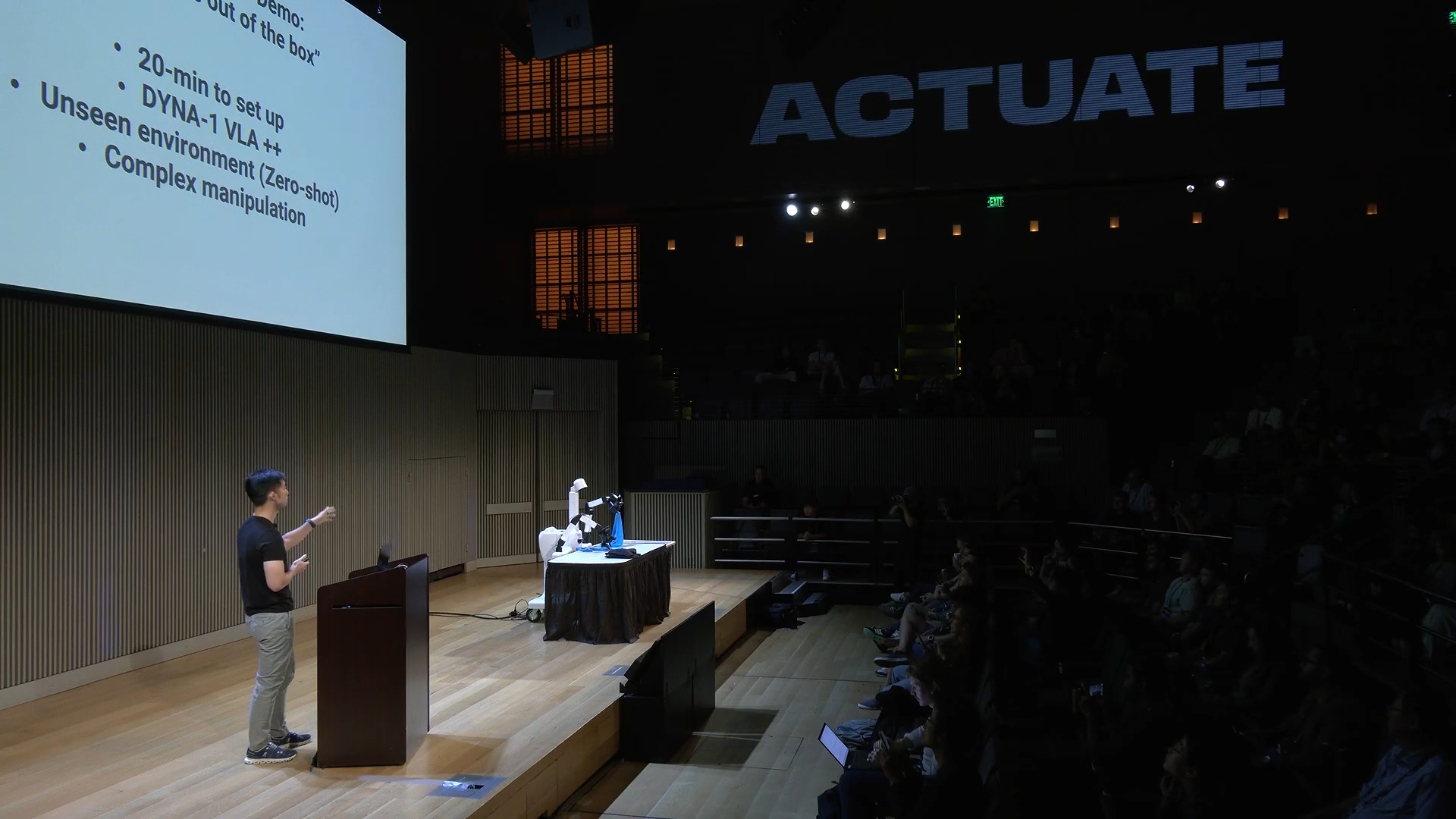
Open-World Dexterity
Production-grade manipulation generalized to unseen environments and live public demos.

NOV '25
DYNA-1 Pre-Training
Zero-shot dexterity from the base model, 100% success with one hour of fine-tuning.