
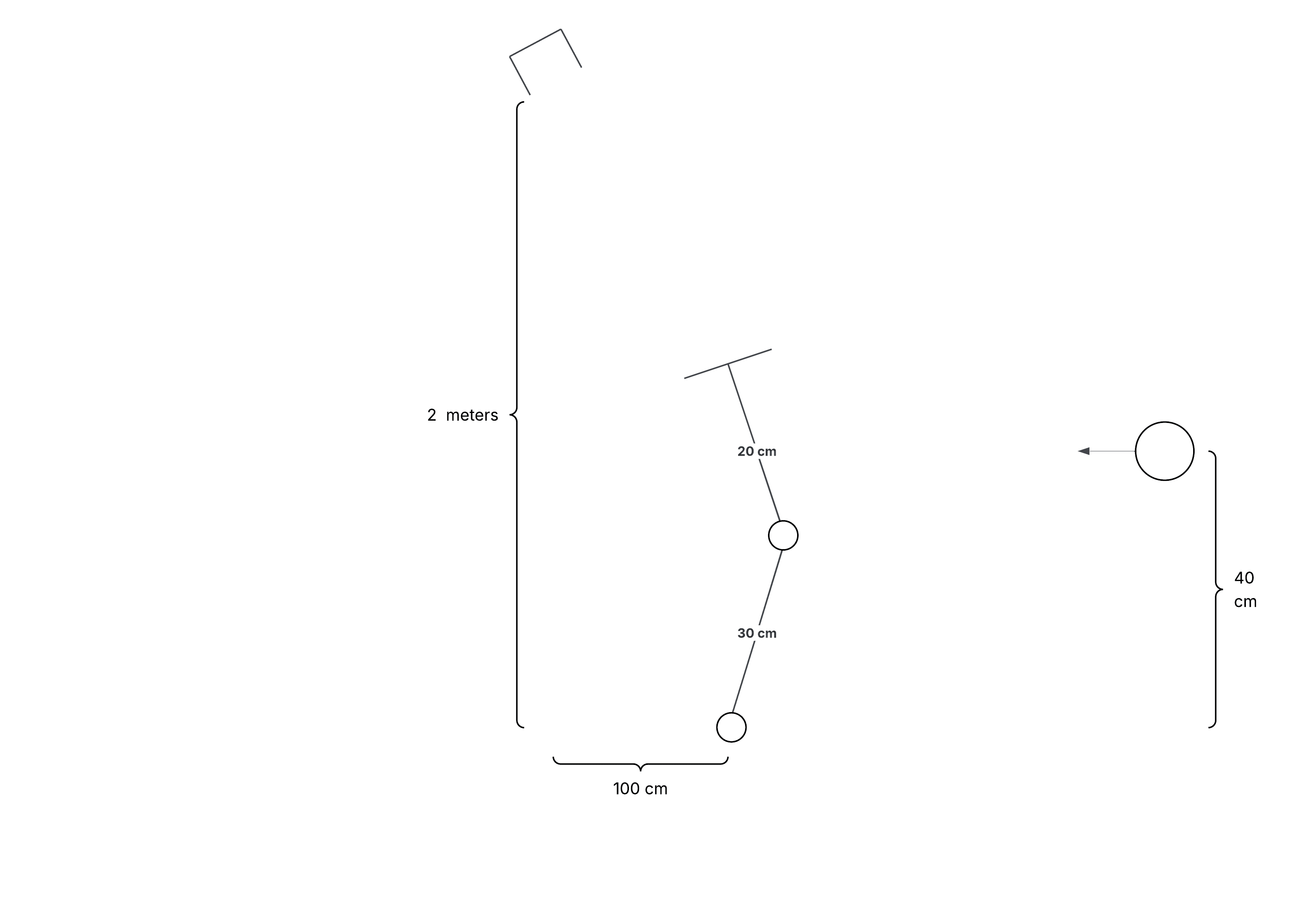
You have an articulated robot arm with two joints. A hockey puck is sliding on ice to the left. The diagram below shows a top down view of the scene. You adjust the arm joints to bounce the hockey puck off the end of the arm into the goal, minimizing the distance from the end of the arm to the goal. How far is the end of the arm from the base?
Give your answer in millimeters, rounded to the nearest millimeter.
© Dyna Robotics, Inc 2025

